I robot industriali anu una flessibilità è una precisione ultra-alta, bassi requisiti per l'ambiente di travagliu, funziunamentu sustenibile, qualità di u produttu stabile, alta efficienza. A fabbrica hà introduttu i robot di movimentazione à 6 assi Yaskawa GP12 per stabilisce un sistema automaticu di carica è scaricamentu di a linea di assemblaggio.
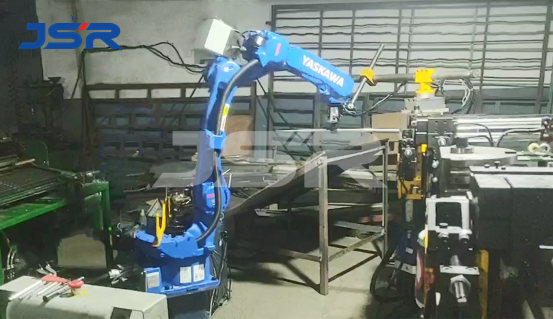
Questa hè una sucietà chì si occupa di pezzi di bicicletta, è GP12 travaglia à u caricamentu è u scaricamentu di manubri di bicicletta. Hà bisognu di spustà u tubu d'acciaiu da u puntu A à a piegatrice di tubi. Dopu à u trattamentu, a piegatrice di tubi u caccia è u move à B. Ci vole à piglià lu cù precisione.
Implementazione di u prugramma:
1. L'ingegnere deve fà una pianificazione di u layout è una custruzzione ragiunevuli secondu l'ambiente di travagliu attuale di u situ di u cliente.
2. Cunduce u cablaggio d'interazzione di u signale secondu i signali richiesti da l'equipaggiu esternu di campu è da u robot.
3. Hà prugrammatu u prugramma logicu di u robot è hà insignatu a traiettoria di u robot.
4. L'esecuzione di e prove di u prugramma risponde à i requisiti di cuntrollu è à i bisogni di pruduzzione.
5. Aghju cumpletatu l'installazione è u debugging in situ, è aghju furnitu una furmazione nantu à l'usu di l'equipaggiu per i clienti.
6. Dopu à uni pochi di ghjorni di travagliu, l'equipaggiu in situ hà una rata di fallimentu zero, chì pò risponde à a pruduzzione ininterrotta di 24 ore di a fabbrica.
U robot di manipulazione riduce l'intensità di u travagliu di i travagliadori, migliora a pruduzzione è l'efficienza di u travagliu, assicura a sicurezza persunale di i travagliadori è realizza l'automatizazione, l'intelligenza è l'umanizazione. Jiesheng hè dispostu à furnisce suluzioni persunalizate di automatizazione di robot industriali per ogni cliente.

Data di publicazione: 09 di nuvembre di u 2022
