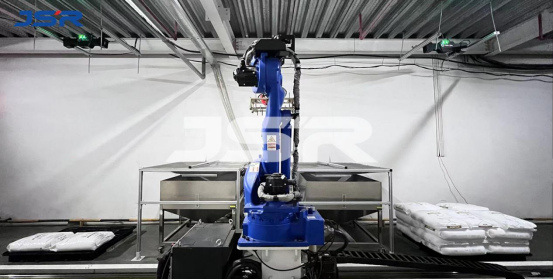
JSR's automatizazione di prucessu di manipulazione robotica cun YASKAWA U robot di manipulazione hè applicatu in a manipulazione è u disimballamentu di sacchetti di particelle di plastica, hè aoperazione di manipolazione precisa, affidabile è sustenibile, cuntribuendu valore à prumove l'automatizazione di a produzzione.
Ùn importa micca in l'aspettu di a machina, l'agricultura, a robba, a custruzzione o a vita di ogni ghjornu, pudemu vede a figura di particeddi plastichi riciclati. Dopu à l'imballu, sti particeddi anu da esse trattatu manualmente, chì hè un travagliu intermittenti cù costu altu è intensità di travagliu alta. U tempu di travagliu precedente di u cliente era 8 ore, è ogni saccu di materiali era 25Kg. L'efficienza manuale hè di 2 sacchetti per minutu, è 960 sacchetti ponu esse disassemblati in un ghjornu. U tempu di travagliu dopu a manipulazione è u disassemblamentu di u robot hè di 24 ore, chì pò esse operatu continuamente, è l'efficienza hè di 3 sacchetti per minutu, è 4320 sacchetti ponu esse disassemblati in un ghjornu.
E soluzioni implementate da Jieshita per i clienti: robot di manipulazione Yaskawa GP180, rail di terra di 7,5 m di lunghezza, bin di materiale, rack di materiale, GP180 carica massima 180 kg, larghezza massima di braccia 2702 mm. 7,5 m di u viaghju di l'orbita di a terra effettiva hè 6 m, a velocità di muvimentu hè 0,7 m/s. Sistema di blanking di identificazione visuale 3D. Sistema di blanking d'identificazione visuale 3D, camera cù funzione d'apprendimentu, attraversu l'acquisizione di dati di u materiale iniziale è u mudellu di materiale più tardi, cusì chì a rata di successu di ricunniscenza di càmera hè di 99,9%.
A produzzione automatica migliurà assai l'efficienza di u travagliu, a capacità di produzzione stabile, a consegna precisa, alta sicurezza, usu raghjone di l'area esistente, migliurà l'immagine corporativa è a pulizia di l'attellu, per ottene una produzzione senza equipaggiu.
Tempu di Postu: 26-Sep-2022
